Building a Simple Neural Network
Neural Network Construction
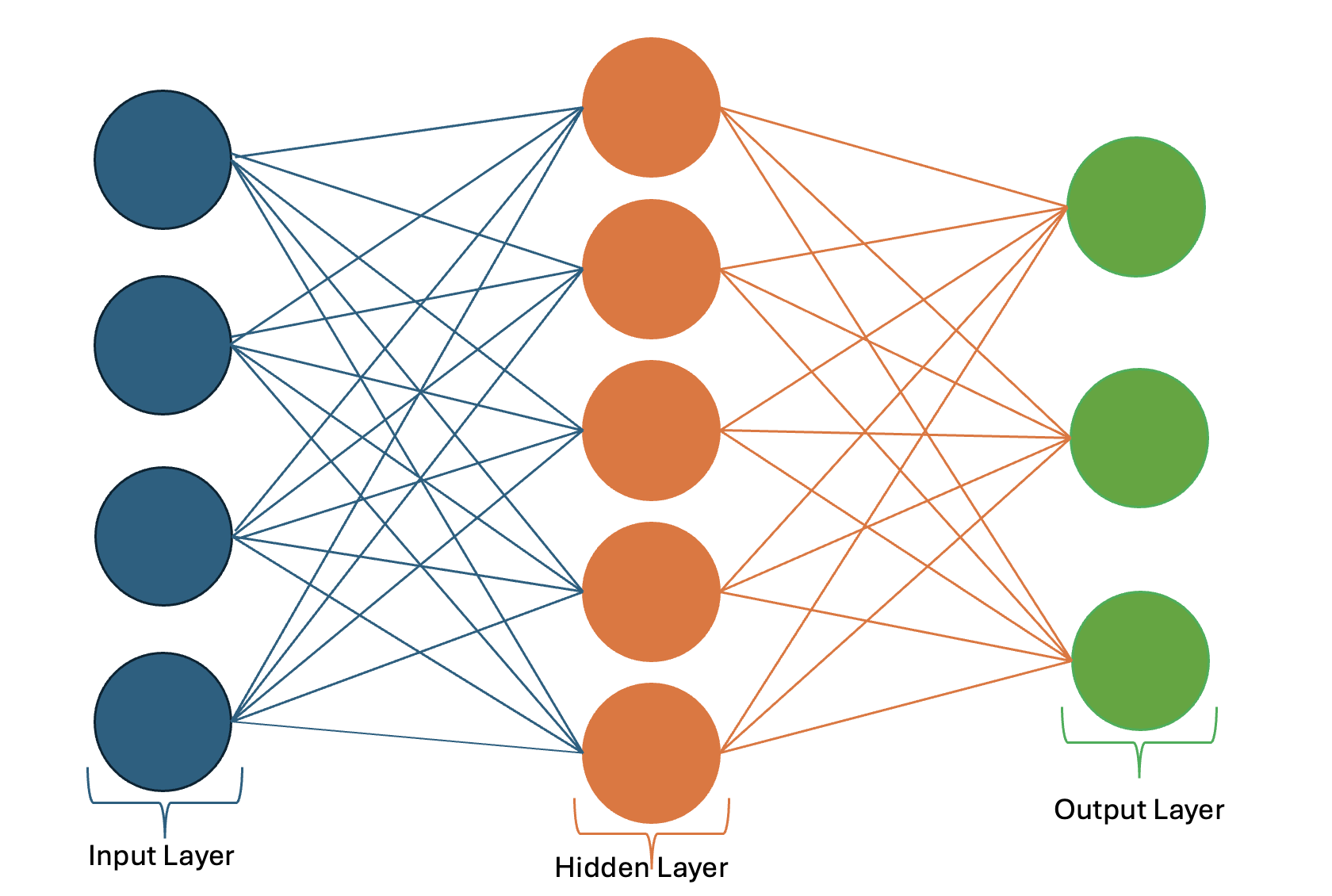
A neural network consists of multiple layers, each performing specific transformations on the input data.
Frequently used Layers in PyTorch:
import torch.nn as nn
fc_layer = nn.Linear(in_features=128, out_features=64) # Fully Connected Layers
conv_layer = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=3, stride=1, padding=1) # Convolutional Layers
rnn_layer = nn.RNN(input_size=10, hidden_size=20, num_layers=2, batch_first=True) # Recurrent Layer
dropout_layer = nn.Dropout(p=0.5)
bn_layer = nn.BatchNorm1d(num_features=64)
maxpool_layer = nn.MaxPool2d(kernel_size=2, stride=2)
avgpool_layer = nn.AvgPool2d(kernel_size=2, stride=2)
layer_norm = nn.LayerNorm(normalized_shape=128)
Variations:
nn.Conv1d,nn.Conv2d,nn.Conv3dnn.LSTM→ Handles long dependencies.nn.GRU→ Simpler alternative to LSTM.nn.BatchNorm1d,nn.BatchNorm2d,nn.BatchNorm3dnn.Dropout1d,nn.Dropout2d,nn.Dropout3dnn.MaxPool1d,nn.MaxPool2d,nn.MaxPool3dnn.AvgPool1d,nn.AvgPool2d,nn.AvgPool3dnn.AdaptiveAvgPool2d→ Fixed output size pooling.nn.LayerNorm,nn.InstanceNorm2d
Building a Model and Forward Proporgation
There are two ways to define a neural network, the Sequential Class and the Module Class.
Defining a Model with the Sequential Class
The Sequential class is a PyTorch object used to simplify the creation of NN. It allows stacking layers sequentially in the order they are defined without explicitly writing a forward() method. It’s best used for simple models or prototyping.
import torch.nn as nn
model = nn.Sequential(
nn.Linear(784, 128), # Input Layer
nn.ReLU(), # Activation Layer
nn.Linear(128, 64), # Hidden Layer
nn.ReLU(), # Activation Function
nn.Linear(64,10) # Output Layer
)
Defining a Model with the Module Class
The Module class is the base class for all NN in PyTorch. It provides a framework for defining and organizing the layers of a neural network and enables easy tracking of parameters, gradients, and training. The Forward function defines how the input data is processed through the layers. The .parameters() method (inherited from the Module class) returns the model parameters and is essential for training.
import torch.nn as nn
class SimpleModel(nn.Module):
def __init__(self):
super(SimpleModel, self).__init__()
# Define Layers
self.fc1 = nn.Linear(in_dim,hidden_dim)
self.fc2 = nn.Linear(hidden_dim,out_dim)
def forward(self, x):
# Define forward pass
x = self.fc1(x)
x = nn.ReLU(x)
x = self.fc2(x)
return x
Backpropogation
Backpropagation updates the network’s weights based on the gradient of the loss function.
# Define optimizer and loss function
optimizer = torch.optim.Adam(model.parameters(), lr=0.01)
loss_function = nn.MSELoss()
# Example backpropagation
optimizer.zero_grad() # Clear previous gradients
loss = loss_function(output, torch.tensor([[0.5]])) # Compute loss
loss.backward() # Backpropagate
optimizer.step() # Update weights
Putting it All Together: Training and Testing
We’ve loaded our data into dataloaders
from torch.utils.data import DataLoader, TensorDataset
# Dummy dataset
X_train = torch.rand(100, 10)
y_train = torch.rand(100, 1)
dataset = TensorDataset(X_train, y_train)
dataloader = DataLoader(dataset, batch_size=10, shuffle=True)
We’ve also constructed our model, selected the best loss function and optimizer for our problem, and decided how long to train
import torch.nn as nn
import torch.optim as optim
model = SimpleModel()
loss_fn = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=0.001) # Pass model.paramters()
epochs = 20
Now we define our training and testing loops.
Training
In PyTorch, we explicitly define how we want to perform training with a training loop. The loop represents one forward and backward pass of one batch.
model.train()
for epoch in range(epochs): # loop over epochs
for x_train, y_train in trainloader: # loop over batches
# Send data to GPU (code is the same if no GPU available)
x_train, y_train = x_train.to(device) , y_train.to(device)
# Forward Pass
predicted = model(x_train)
# Backpropagation - tweak the weights/biases of the NN
optimizer.zero_grad() # Clear previous gradients
loss = loss_fn(predicted, y_train.reshape(-1,1)) # Compute the loss
loss.backward() # Backpropogate
optimizer.step() # Update weights
Testing
After training, we test the model with unseen data to estimate its general performance. we use torch.no_grad() to tell PyTorch not to compute the gradient. We pass test data through the network once.
model.eval()
num_batch = len(testloader)
loss = 0
with torch.no_grad():
for x_train, y_train in testloader: # loop over batches
# send data to GPU (code is the same if no GPU available)
x_train, y_train = x_train.to(device), y_train.to(device)
# predict NN output
predicted = model(x_train)
# calculate loss
loss +=loss_fn)predicted,y_train.reshape(-1,1).item()
# calculate other metrics here
# print result
print('avg loss: {}\t avg accuracy:{}'.format(loss/num_batch, acc/num_batch))
Using a Validation Set
A validation set helps tune hyperparameters and evaluate the model’s generalization ability before final testing. You can use a test loop like the one above to evaluate the validation set after each training epoch.
from sklearn.model_selection import train_test_split
# Splitting data
X_train, X_val, y_train, y_val = train_test_split(X_train, y_train, test_size=0.2, random_state=42)
# Creating DataLoaders
train_dataset = TensorDataset(X_train, y_train)
val_dataset = TensorDataset(X_val, y_val)
train_loader = DataLoader(train_dataset, batch_size=10, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=10, shuffle=False)